개요

CM-530
제품 사양
| 항목 | 사양 |
|---|---|
| 무게 | 54g |
| 컨트롤러 | STM32F103RE |
| 동작 전압 | 허용 범위 : 6.5V ~ 15V, 권장 전압 : 11.1V (Li-PO 3cell) |
| 소모 전류량 | IDLE 시 : 50mA 외부 I/O 최대전류 : 0.3A 전체 최대 전류 : 10A (Fuse) |
| 동작 온도 | -5°C ~ 70°C |
| 내부 I/O 장치 | 버튼 : 5 개 (Reset 1, Port 5) 마이크 (소리 감지) : 1 전압 센서 : 1 |
| 외부 I/O 장치 | 로보티즈 5핀 포트 : 6 AX/MX Series 다이나믹셀 커넥터 : 5 |
![]() 위험
(지시사항을 준수하지 않으면 심각한 부상이나 사망에 이를 수 있습니다.)
위험
(지시사항을 준수하지 않으면 심각한 부상이나 사망에 이를 수 있습니다.)
- 제품 주변에 물, 가연성 물질/화기, 용제 등이 담긴 물건을 두지 마세요.
- 제품이 동작 중일 때 손가락, 팔, 발가락 등 신체 일부를 제품 가까이에 두지 마세요.
- 제품에서 이상한 냄새, 소음 또는 연기가 발생하면 즉시 동작을 멈추고 전원을 분리하세요.
- 제품을 어린이의 손이 닿지 않는 곳에 보관하세요.
- 배선 또는 케이블을 설치하거나 전원을 공급하기 전에 입력 전원의 극성을 확인하세요.
![]() 경고
(지시사항을 준수하지 않으면 가벼운 부상이나 제품 손상이 발생할 수 있습니다.)
경고
(지시사항을 준수하지 않으면 가벼운 부상이나 제품 손상이 발생할 수 있습니다.)
- 입력 전압, 전류, 동작 온도 등 제품의 공식 동작 환경 사양을 준수하세요.
- 제품 동작 중 칼날이나 날카로운 물체를 삽입하지 마세요.
![]() 주의
(지시사항을 준수하지 않으면 경미한 부상이나 제품 손상이 발생할 수 있습니다.)
주의
(지시사항을 준수하지 않으면 경미한 부상이나 제품 손상이 발생할 수 있습니다.)
- 제품을 분해하거나 개조하지 마세요.
- 제품을 떨어뜨리거나 강한 충격을 가하지 마세요.
- 전원이 공급되는 동안 DYNAMIXEL 케이블을 연결하거나 분리하지 마세요.
각 부 명칭
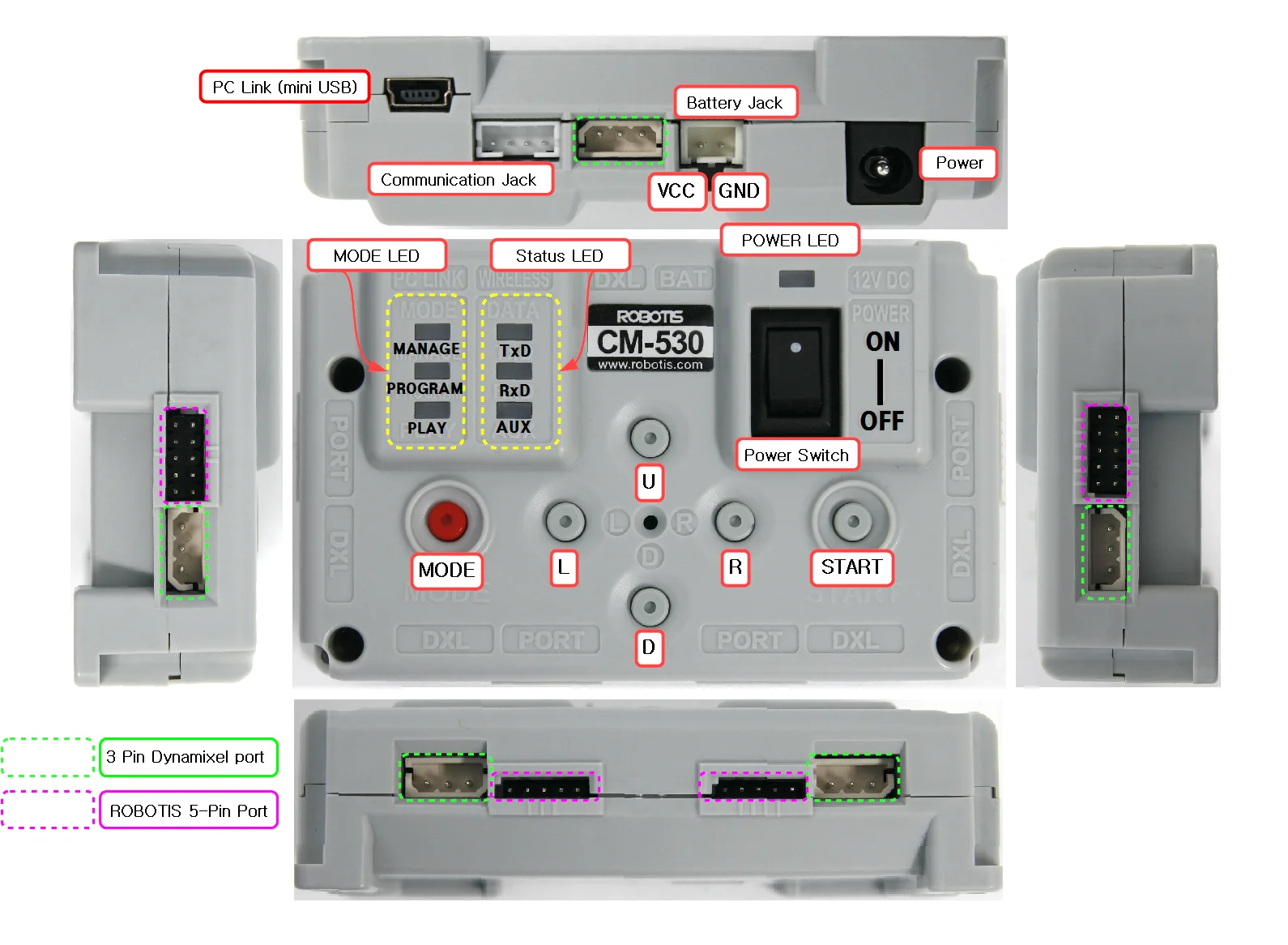
[CM-530 각 부 명칭]
- mini USB 연결잭 : USB 케이블로 CM-530 과 PC 의 USB 포트를 연결하는 포트입니다. 태스크 코드 다운로드 또는 PC와의 통신용으로 사용됩니다.
- 통신장치 연결 포트 : ZIG-110, BT-110, 적외선 수신기 등의 무선 통신용 모듈이나 기타 외부 보드와의 통신용으로 사용되는 포트입니다.
- 배터리 소켓 : 배터리를 연결하는 소켓입니다.
- 전원잭 : 전원 공급기(SMPS)의 전원잭을 연결하는 소켓입니다.
- 전원 LED : 전원이 ON 상태이면 켜지고 OFF 상태이면 꺼지는 LED 입니다.
- 전원 스위치 : 전원을 ON / OFF 하기 위해 사용하는 스위치입니다.
- MODE 버튼 : CM-530 의 동작 모드를 변경하기 위한 버튼입니다. 아래의 모드 관련 설명을 참고하세요.
- START 버튼 : 모드 선택을 위한 버튼입니다. 아래의 모드 관련 설명을 참고하세요.
- U / L / D / R 버튼 : 프로그램 동작 중 입력 수단으로 사용할 수 있도록 할당된 버튼입니다. 이 버튼들로 로봇에게 명령을 내릴 수 있습니다.
- AX/MX Series 버스 포트 : AX/MX다이나믹셀을 Daisy chain 으로 연결하기 위한 포트입니다.
- 로보티즈 5핀 포트 : DMS, 접촉 센서, 적외선 센서 등의 주변장치를 연결하기 위한 포트입니다. 각 포트의 포트 번호는 I , II , III, IIII , IIIII , IIIIII 과 같이 막대 숫자로 표시되어 있습니다.
- 모드 표시 LED : 현재 CM-530 의 동작 모드를 나타내는 LED 입니다. 보다 자세한 내용은 아래에 설명이 있습니다.
MANAGE
[ MANAGE ]
- 다이나믹셀 관리모드가 실행 중임을 나타냅니다.
- RoboPlus Manager를 이용하여 CM-530, AX/MX 다이나믹셀 의 동작을 설정하거나 테스트하기 위해 사용합니다.
- RoboPlus Manager 와 CM-530이 연결 되었을때 자동으로 실행됩니다.
PROGRAM
[ PROGRAM ]
- 모션 편집 모드가 실행 중임을 나타냅니다.
- RoboPlus Motion 을 이용하여 모션을 편집할 떄 사용합니다.
- RoboPlus Motion 과 CM-530이 연결 되었을 때 자동으로 실행 됩니다.
PLAY
[ PLAY ]
-
태스크 코드 모드가 실행 중임을 나타냅니다.
-
RoboPlus Task를 이용하여 작성한 코드를 CM-530에 다운로드 한 뒤에 사용합니다.
-
PLAY LED가 깜빡거릴때 사용자가 직접 START 버튼을 눌러서 실행시켜야 합니다.
-
상태 표시 LED : 현재 CM-530 의 상태를 나타내는 LED 입니다. 보다 자세한 내용은 아래에 설명이 있습니다.
- TxD : CM-530 이 외부로 데이터를 송신하는 동안 켜집니다.
- RxD : CM-530 이 외부로부터 데이터를 수신하는 동안 켜집니다.
- AUX : 사용자가 프로그램에서 사용할 수 있도록 할당된 LED 입니다. 태스크 코드를 이용하여 켜거나 끌 수 있습니다.
Pinout
Power
External 5-Pin Port
Communication Device Connection Port
3-Pin Connector Port
전원 연결
CM-530 에 배터리 소켓에 배터리를 연결하거나, 전원 공급기인 SMPS 를 전원잭 소켓에 연결하고 전원 스위치를 ON 으로 설정하면 전원이 인가됩니다. 전원이 인가되면 Power LED 가 켜지며, 모드 표시 LED 중 하나가 깜빡입니다.

작동 방법
-
[전원 켜기] : 전원 스위치를 OFF에서 ON으로 변경하시면 전원이 켜집니다.
만약 전원 스위치를 ON으로 연결했을경우에도 전원이 켜지지 않는다면 배터리가 방전되었을 수 있습니다. 충전하기를 참조하여 충전을 하시거나 전원공급기(SMPS)를 이용하여 전원을 연결하시기 바랍니다.
-
[ 시작 ] : 로봇을 동작시키기 위해서는 모드 버튼을 이용하여 PLAY로 이동시킵니다. LED가 PLAY에 깜빡이고 있을때 시작(START) 버튼을 눌러 실행을 시킵니다.
시작(START) 버튼을 누르면 PLAY의 LED가 더 이상 깜빡이지 않고 계속 LED가 켜져 있는 상태가 되야 올바로 실행 되고 있는 상태입니다.
-
[ 종료 ] : 실행되고 있는 동작을 중단하고 싶을 경우 모드(MODE) 버튼을 눌러서 다시 대기 모드 상태로 만들거나 전원 스위치로 전원을 OFF 합니다.
활용 방법
RoboPlus
-
다이나믹셀과 주변 장치를 제어하기 위해 사용되는 제어기로, 다이나믹셀(AX/MX Series... 등)과 올로의 각종 부품들(접촉센서, LED모듈, 적외선센서 등..)을 연결할 수 있습니다.
-
RoboPlus Motion 을 통해 특정 모션을 편집, 저장할 수 있습니다. 저장된 Motion (mtn파일) 은 RoboPlus Task 를 통해 필요할 때 언제든 실행할 수 있으며, 제어용 태스크 코드를 작성하여 각 부품들의 동작을 제어할 수 있습니다.
임베디드 C
- CM-530 제어기는 C언어로 제어할 수 있습니다. 자세한 사항은 임베디드 C 부분을 참조하십시오.
PC 연결
PC 와 CM-530 이 통신하기 위해서는 USB 케이블로 CM-530 의 mini USB 연결잭과 PC 의 USB 포트를 연결해야 합니다.

무선 통신 모듈 연결
- CM-530에는 ZIG-110 / BT110 무선 통신 모듈을 연결할 수 있습니다.

충전하기
로봇 작동 중 배터리 경고음이 울리면, 배터리를 충전합니다. 충전이 시작되면 충전기의 붉은색 LED가 깜빡입니다. 충전이 완료되면 녹색 LED가 켜집니다.
-
배터리 분리
-
충전기 연결
-
충전

충전중 (붉은색 LED), 충전완료 (녹색 LED)

SMPS 를 로봇에 직접 연결하면 외부 전원으로 로봇을 구동할 수도 있습니다.

배터리에는 충전용 커넥터와 로봇 작동용 커넥터가 연결되어 있습니다.
Charging Time and Battery Life/Operating
Charging Time
- 완전 방전 시 : 1~1.5시간
- 배터리를 오랫동안 완전 방전 상태로 방치하면 수명이 급격히 단축될 수 있습니다.
- 배터리 충전 시간은 배터리 상태에 따라 다릅니다. (충전 시간이나 배터리 수명이 너무 짧아진 경우 배터리 교체가 필요할 수 있습니다.)
주의
- 배터리를 로봇이나 충전기에 연결된 상태로 보관하지 마세요.
- 장기간 사용하지 않을 경우 배터리를 반 정도 충전된 상태로 보관하세요.
- 고온 또는 다습한 환경에 배터리를 보관하지 마세요.
퓨즈 교체하기
CM-510/ CM530 에는 과전류가 흘러서 회로가 망가지는 것을 방지하기 위한 퓨즈(Fuse)가 있습니다. 만약 CM-510/ CM530 이 배터리로는 전원이 켜지지 않고, SMPS 로만 전원이 켜진다면 퓨즈가 끊어진 것이니 교체해 주어야 합니다.
※ CM-510/ CM530 의 퓨즈 사이즈는 아래와 같으며, 용량은 125V / 5A ~ 10A 사이의 제품을 사용하시면 됩니다.

※ 퓨즈의 교체 방법
-
CM-510/ CM530 뒷면의 퓨즈(FUSE) 를 확인한다.

-
핀셋 등으로 퓨즈를 새 것으로 교체한다.

사용자 응용 장치 제작을 위한 핀 정보
전원
CM-530의 전원 핀 구성은 다음과 같습니다.

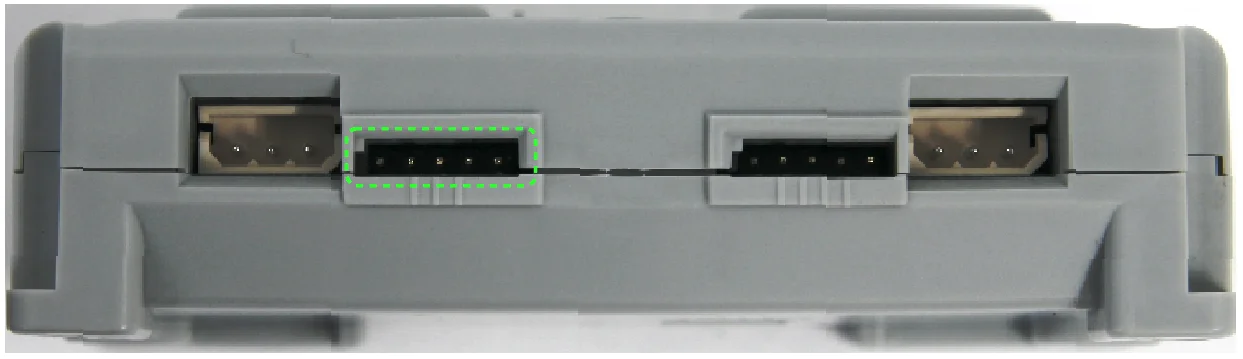
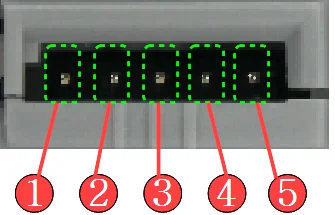
외부 5핀 포트
CM-530의 외부 포트 핀 구성은 다음과 같습니다.


- OUT1 : 3.3V 출력 가능 (최대 허용 전류 0.3A)
- VCC (5V)
- ADC : 사용자가 제작한 센서의 아날로그 신호를 읽을 수 있음.
- GND
- OUT2 : 3.3V 출력 가능 (최대 허용 전류 0.3A)
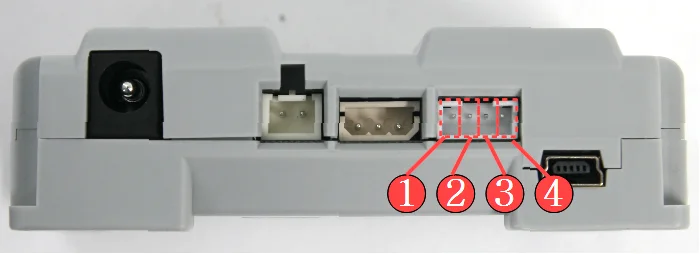
통신 장치 연결 포트
통신 장치 연결 포트의 핀 기능은 다음과 같습니다.

- GND : Ground Level (0v)
- VCC : Supply Voltage ( 2.7~3.6V )
- RXD : Receive Signal 단자
- TXD : Transmit Signal 단자
3핀 커넥터 포트
3핀 커넥터 포트의 핀 기능은 다음과 같습니다. 자세한 사항은 AX 시리즈 핀 배열을 참조하십시오. 모서리의 각진 부분을 참조하여 방향이 바뀌지 않도록 유의하십시오.

- GND : Ground Level (0v)
- VDD : Supply Voltage (베터리 전압과 동일)
- DATA : Data 전송 핀
경고: 사용자의 안전을 보호하고 재산상의 손해를 방지하기 위해, DYNAMIXEL과 보드에 장착된 핀 배열을 반드시 확인하세요. DYNAMIXEL의 핀 배열은 커넥터 제조사에 따라 다를 수 있습니다.
관련 동영상
로보플러스 매니저 사용하기(CM-530편)