PRO Series

DYNAMIXEL PRO 경고 : DYNAMIXEL PRO는 단종되었습니다.
제품 라인업
제품 라인업
-
일체형 로봇 구동 장치: 로봇 관절에 필요한 기능을 하나의 모듈에 통합했습니다.

-
강하고 내구성 있는 사이클로이드 감속기: DYNAMIXEL PRO implements removable reduction cycloid gears. Small and lightweight cycloids allow a high-ratio reduction gear device. Also cycloid gears are more resistant to vibrations and impacts resulting in minimal backlash.
-
다양한 모델: DYNAMIXEL PRO motor, redactor, reduction ratio, communications type, etc have been accommodated to meet various price ranges. The user is able to choose the most proper DYNAMIXEL PRO model necessary for the robot.
-
다양한 제어 알고리즘: DYNAMIXEL PRO position, velocity, and electrical current can be controlled via algorithms. The user can control these 3 aspects in any combination and properly tune the robot. DYNAMIXEL PRO provides a graph illustrating the relationship between electrical current and torque. This feature is useful for torque control via current control.
-
정밀 제어: with a maximum of 502,000 units per revolution the user can control 0.0007 degrees per unit allowing for high-precision control..
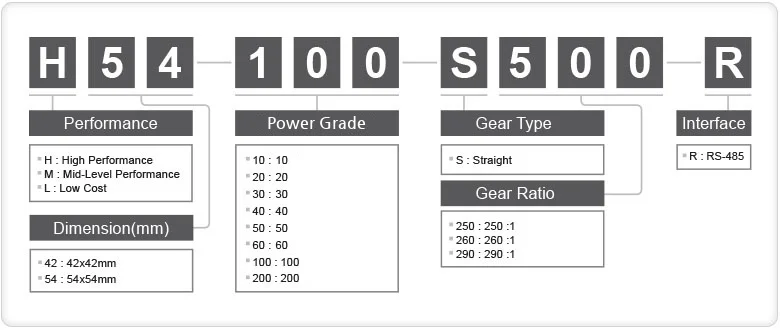
Key 사양
| Model | Dimensions(mm) | 무게 | 해상도 | Motor |
|---|---|---|---|---|
| H54-200-S500-R H54-200-S500-R(A) | 54 x 126 x 54 | 855g | 501,923 | BLDC(Maxon) |
| H54-100-S500-R H54-100-S500-R(A) | 54 x 108 x 54 | 732g | 501,923 | BLDC(Maxon) |
| H42-20-S300-R H42-20-S300-R(A) | 42 x 84 x 42 | 340g | 303,750 | Coreless(Maxon) |
| M54-60-S250-R M54-60-S250-R(A) | 54 x 126 x 54 | 853g | 251,417 | BLDC(Maxon) |
| M54-40-S250-R M54-40-S250-R(A) | 54 x 108 x 54 | 710g | 251,417 | BLDC(Maxon) |
| M42-10-S260-R M42-10-S260-R(A) | 42 x 72 x 42 | 269g | 263,187 | Coreless(Maxon) |
| L54-50-S290-R | 54 x 108 x 54 | 656g | 207,692 | BLDC |
| L54-50-S500-R | 54 x 108 x 54 | 656g | 361,384 | BLDC |
| L54-30-S400-R | 54 x 108 x 54 | 612g | 288,395 | BLDC |
| L54-30-S500-R | 54 x 108 x 54 | 591g | 361,384 | BLDC |
| L42-10-S300-R | 42 x 72 x 42 | 257g | 4,096 | Coreless |
통신 회로
UART 연결
사용자 제작 Main Controller로 DYNAMIXEL PRO를 제어하려면 Main Controller의 UART 신호를 RS-485 신호로 변환해야 합니다. 다음은 권장 변환 회로도입니다.
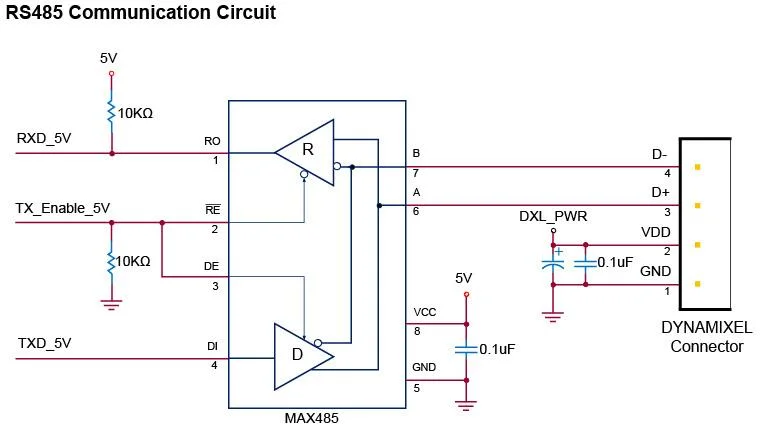
참고: 위 회로는 5V 또는 5V tolerant MCU를 기준으로 설계되었습니다. 그렇지 않은 경우 MCU 전압에 맞도록 Level Shifter를 사용하세요.
전원은 DYNAMIXEL의 Pin1(-)과 Pin2(+)를 통해 공급됩니다. 위 회로는 DYNAMIXEL 전용 컨트롤러에 내장되어 있습니다.
위 회로도에서 TTL Level의 TxD와 RxD 데이터 신호 방향은 TX_Enable_5V 레벨에 따라 다음과 같이 결정됩니다.
TX_Enable_5V= High :TXD_5V신호가D+및D-로 전달됩니다.TX_Enable_5V= Low :D+및D-신호가RXD_5V로 전달됩니다.
Pin 배열
커넥터의 Pin 배열은 아래와 같습니다. DYNAMIXEL PRO에는 pin-to-pin 형태로 배열된 두 개의 4-pin 커넥터가 있습니다. 이 배열에서는 커넥터 순서에 우선순위가 없으며 MX 시리즈처럼 구동할 수 있습니다. 또한 대전류 동작을 위한 전원 입력 전용 2-pin 커넥터가 있습니다.
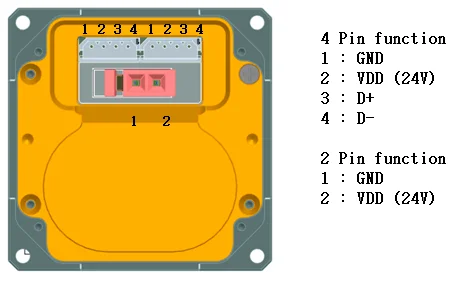
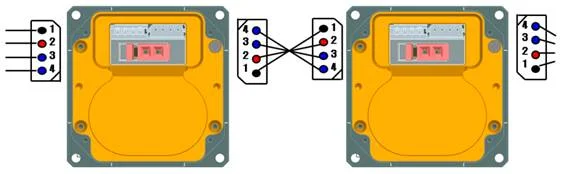

경고 : 배선할 때 Pin 배열에 주의하세요. 잘못 연결하면 DYNAMIXEL PRO가 심각하게 손상될 수 있습니다.
연결 확인
배선이 올바르게 되어 DYNAMIXEL PRO에 전원이 정상 공급되면 LED가 한 번 깜박입니다.