커뮤니티 쇼케이스
: 사용자들의 영감을 주는 프로젝트
DYNAMIXEL 생태계는 사용자들의 창의성과 혁신으로 성장합니다. 전 세계 연구자, 대학, 기업이 개발한 오픈소스 프로젝트를 소개합니다. DYNAMIXEL 액추에이터의 다양한 활용 사례와 로봇 기술의 가능성을 확인해 보세요.
동료 개발자들이 DYNAMIXEL 기술로 미래를 만들어 가는 방법을 살펴보세요. 많은 프로젝트가 Powered by DYNAMIXEL로 구동됩니다.
DYNAMIXEL을 사용하는 프로젝트
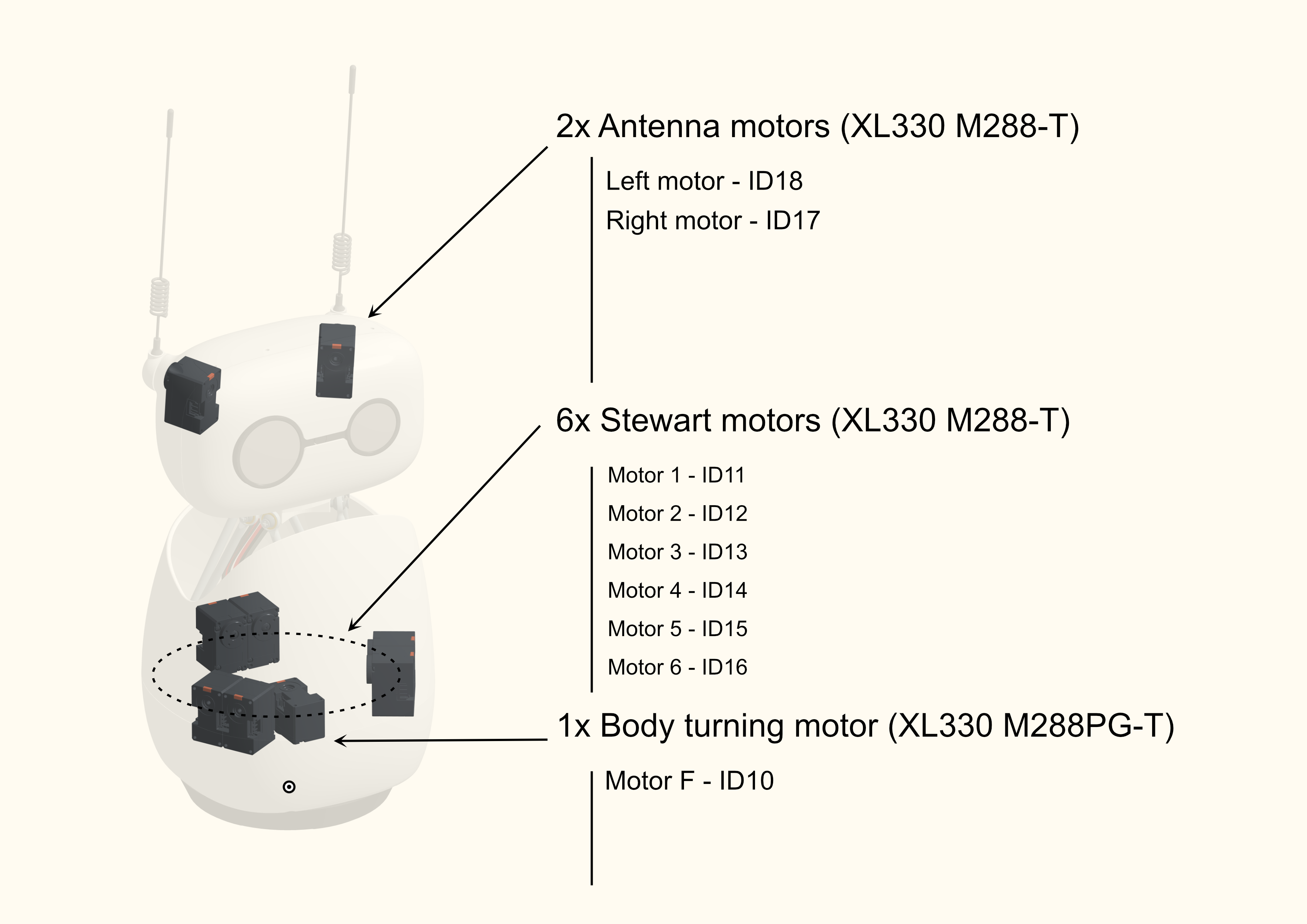
Reachy-Mini
Developed by: Pollen Robotics
Reachy-Mini is a small, agile, and versatile robot designed for research and education in robotics. It uses nine DYNAMIXEL XL330-M288-T actuators.
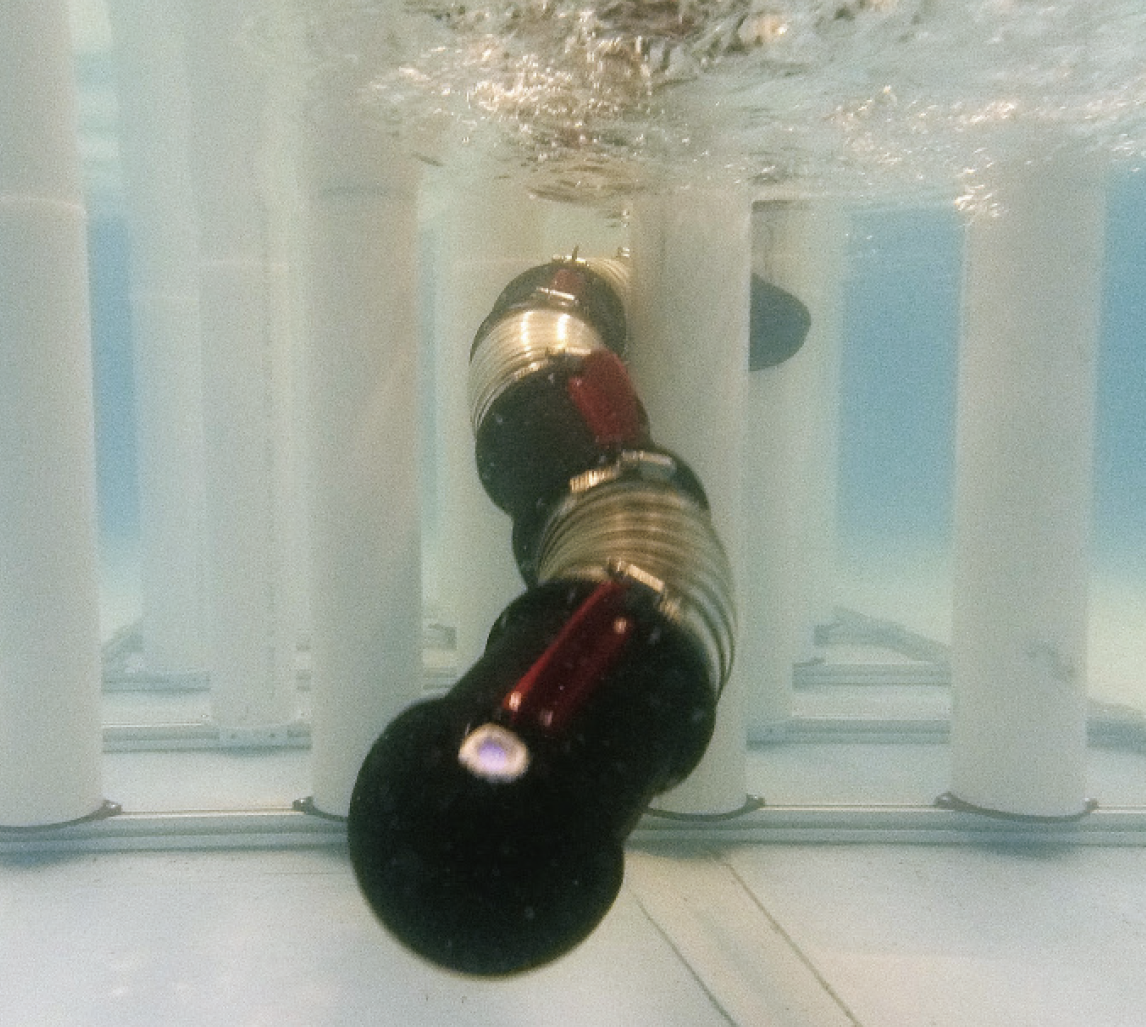
AquaMILR+
Developed by: CRAB Lab
An untethered limbless robot designed for complex aquatic terrain navigation. It uses DYNAMIXEL 2XL430-W250-T and 2XC330-T288-T actuators.
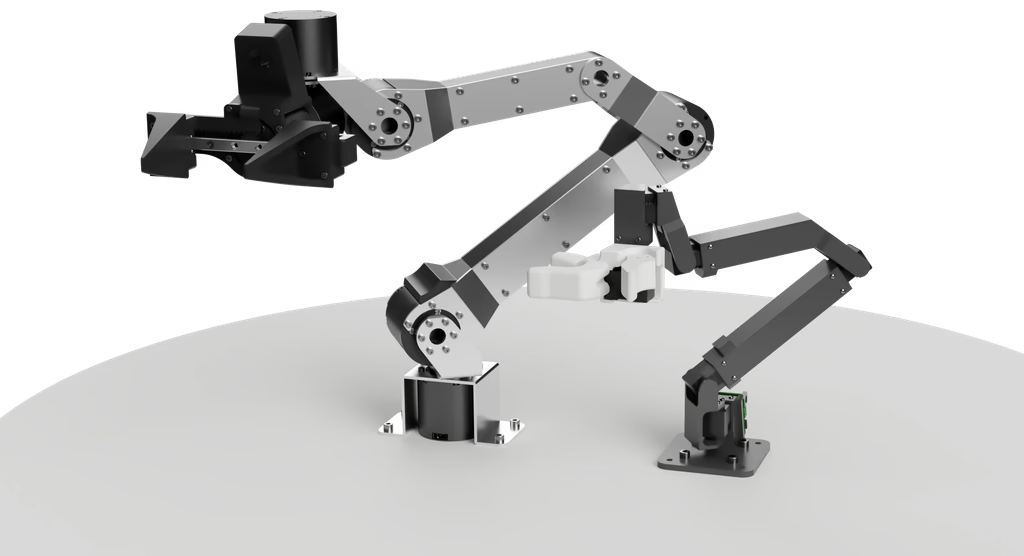
TRLC-DK1
Developed by: The Robot Learning Company
An open source dev kit for AI-native robotics. The leader arm uses seven DYNAMIXEL XL330-M077-T actuators.
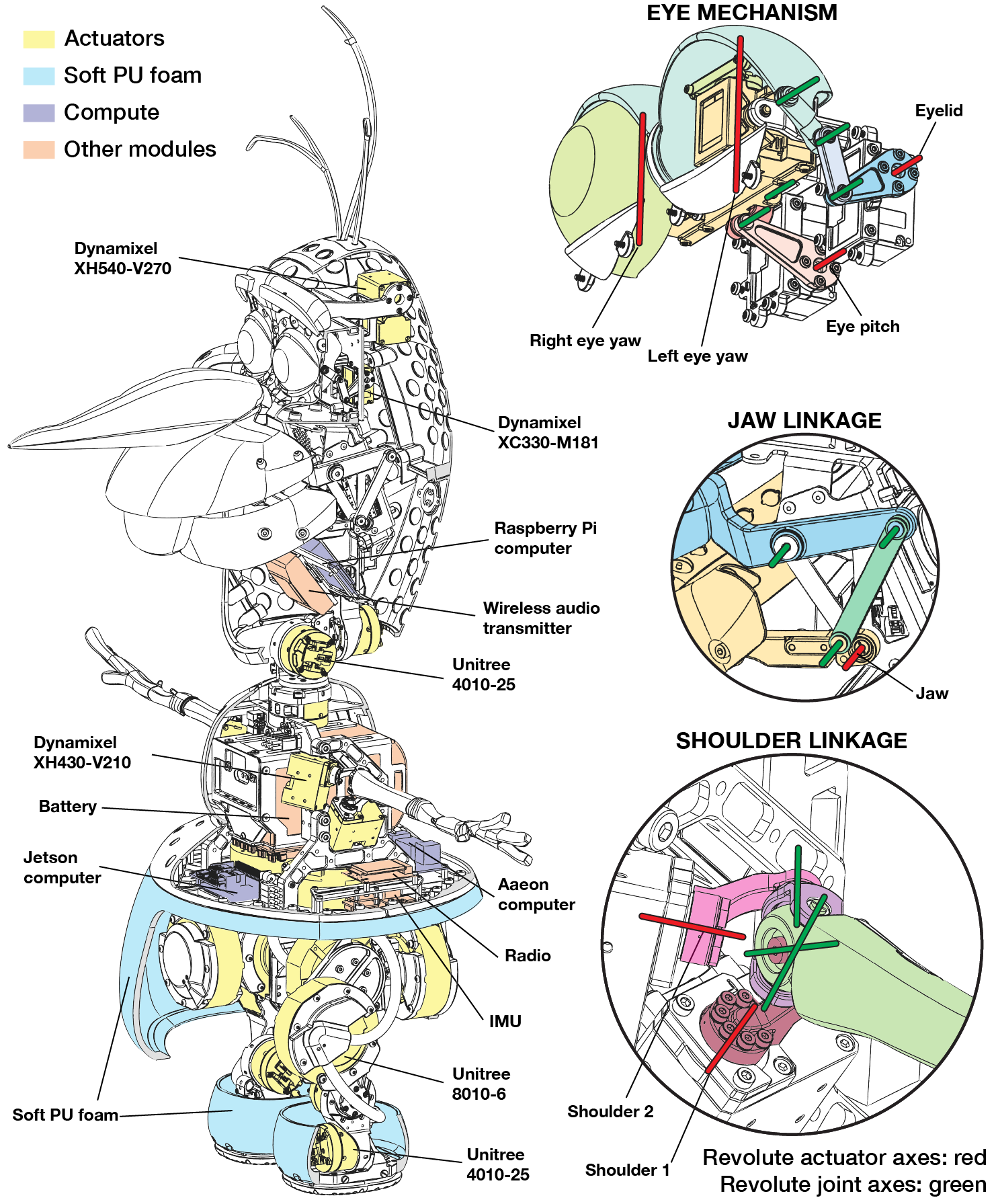
Olaf Robot
Developed by: Walt Disney Imagineering
Disney Imagineering's physical Olaf robot, controlled with RL using animation references. It uses DYNAMIXEL XH540-V270, XH430-V210, and XC330-M181 actuators.
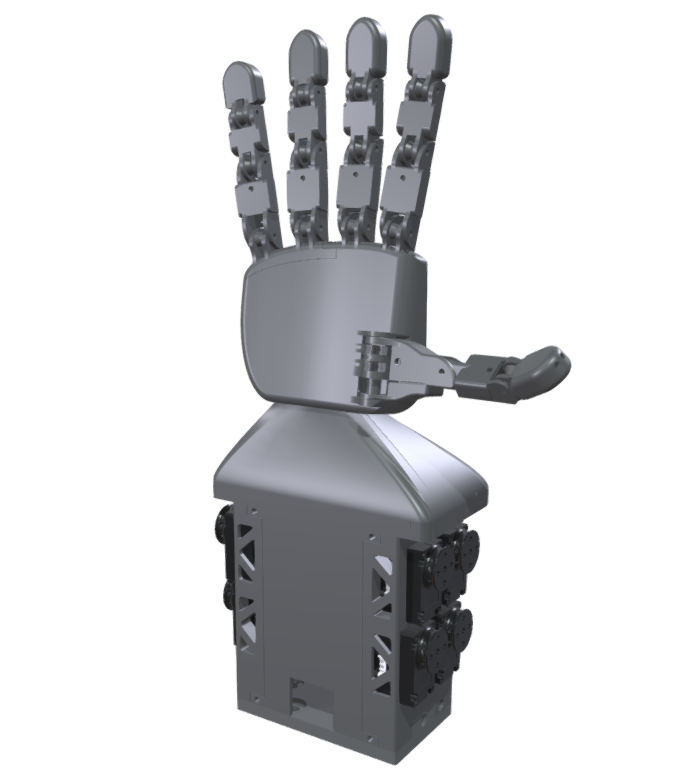
EN02-OP
Developed by: Westwood Robotics
A high-performance, open-source robotic hand designed for advanced manipulation tasks, utilizing DYNAMIXELs for precise control.

LeapHand
Developed by: Carnegie Mellon University
A low-cost, highly capable, and open-source anthropomorphic robotic hand, often integrating DYNAMIXEL actuators.
LEGATO
Developed by: The University of Texas at Austin, The AI Institute
An open-source, affordable, and robust robotic hand for research and education, frequently powered by DYNAMIXELs.
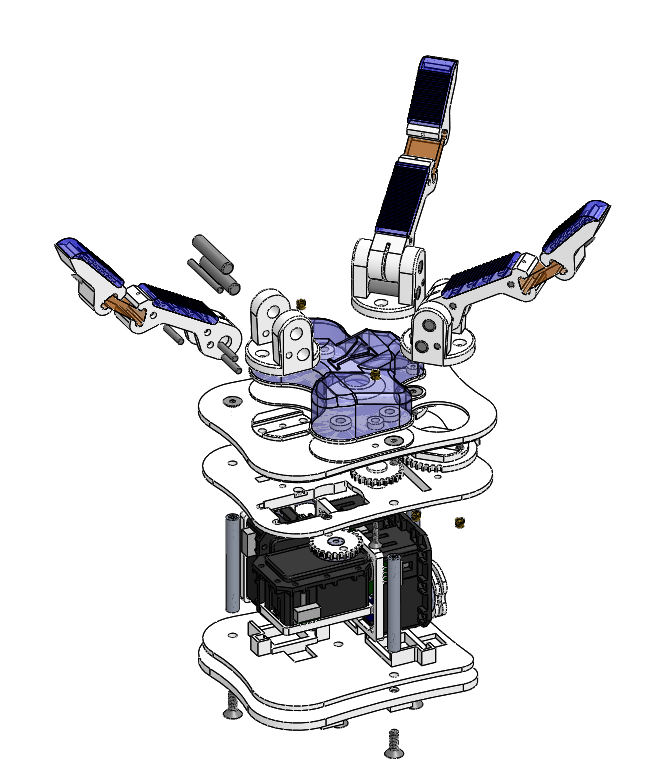
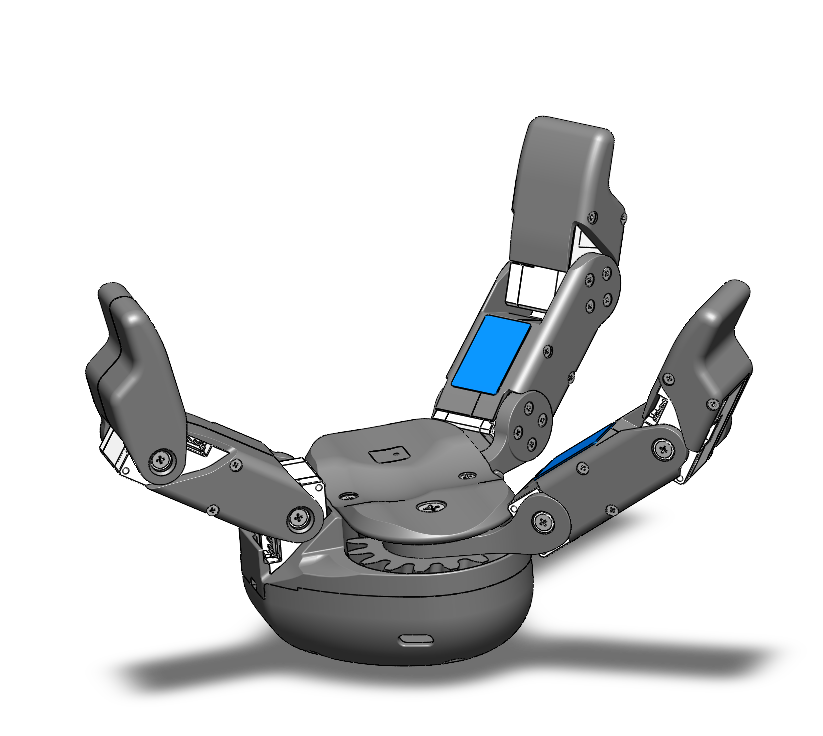
OpenHand
Developed by: Yale University
A project focusing on open-source, customizable, and accessible robotic hand designs, with DYNAMIXELs as a common choice for actuation.
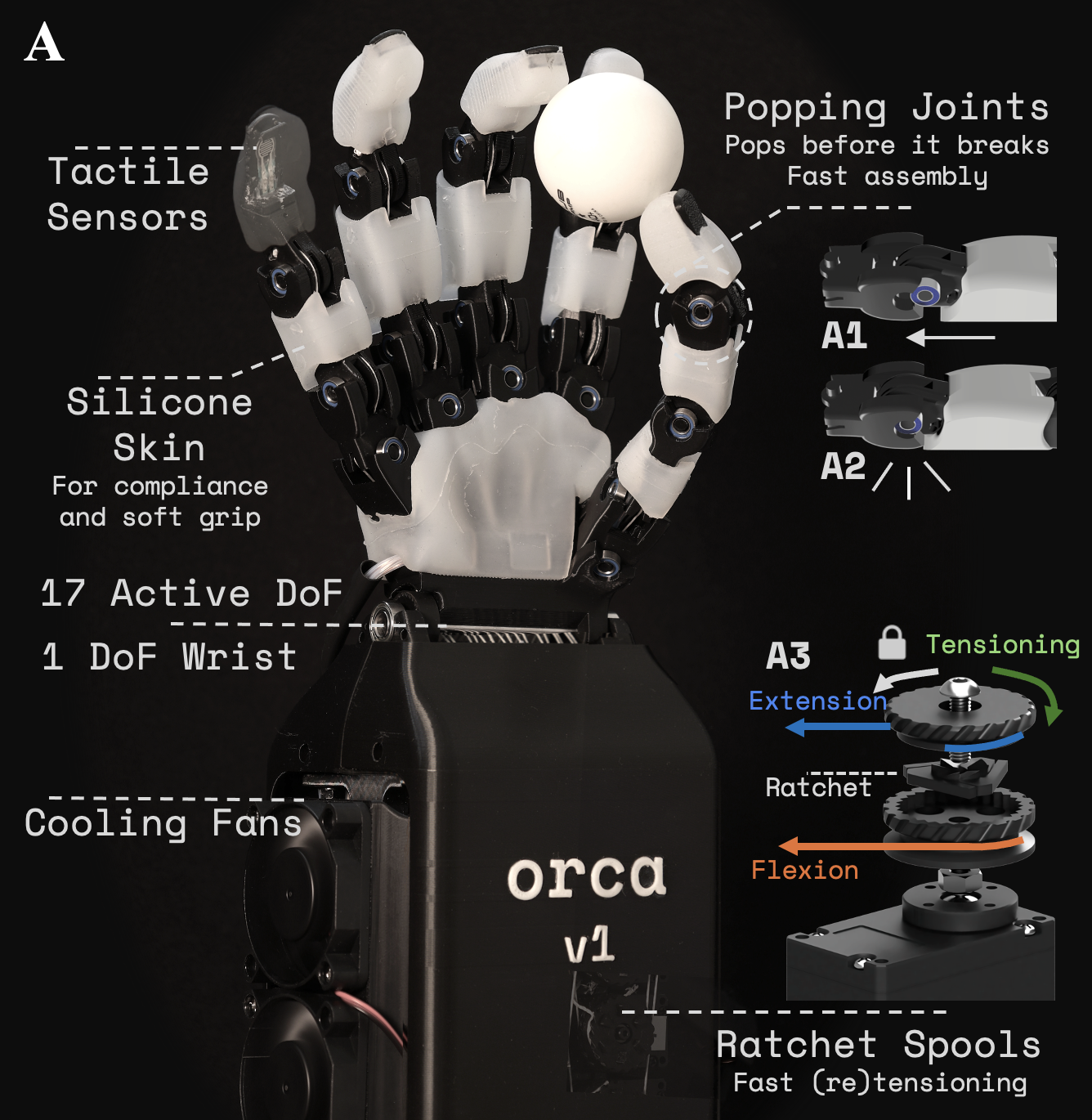
Orca Hand
Developed by: ETH Zurich
A modular and powerful open-source robotic hand for dexterous manipulation, showcasing the capabilities of DYNAMIXELs.
Ruka-Hand
Developed by: New York University
An open-source, 3D-printable robotic hand designed for accessibility and research, often built with DYNAMIXEL actuators.

LeKiwi-DYNAMIXEL
Developed by: SIG Robotics team at the University of Illinois Urbana-Champaign
LeKiwi - Low-Cost Mobile Manipulator (DYNAMIXEL Edition)

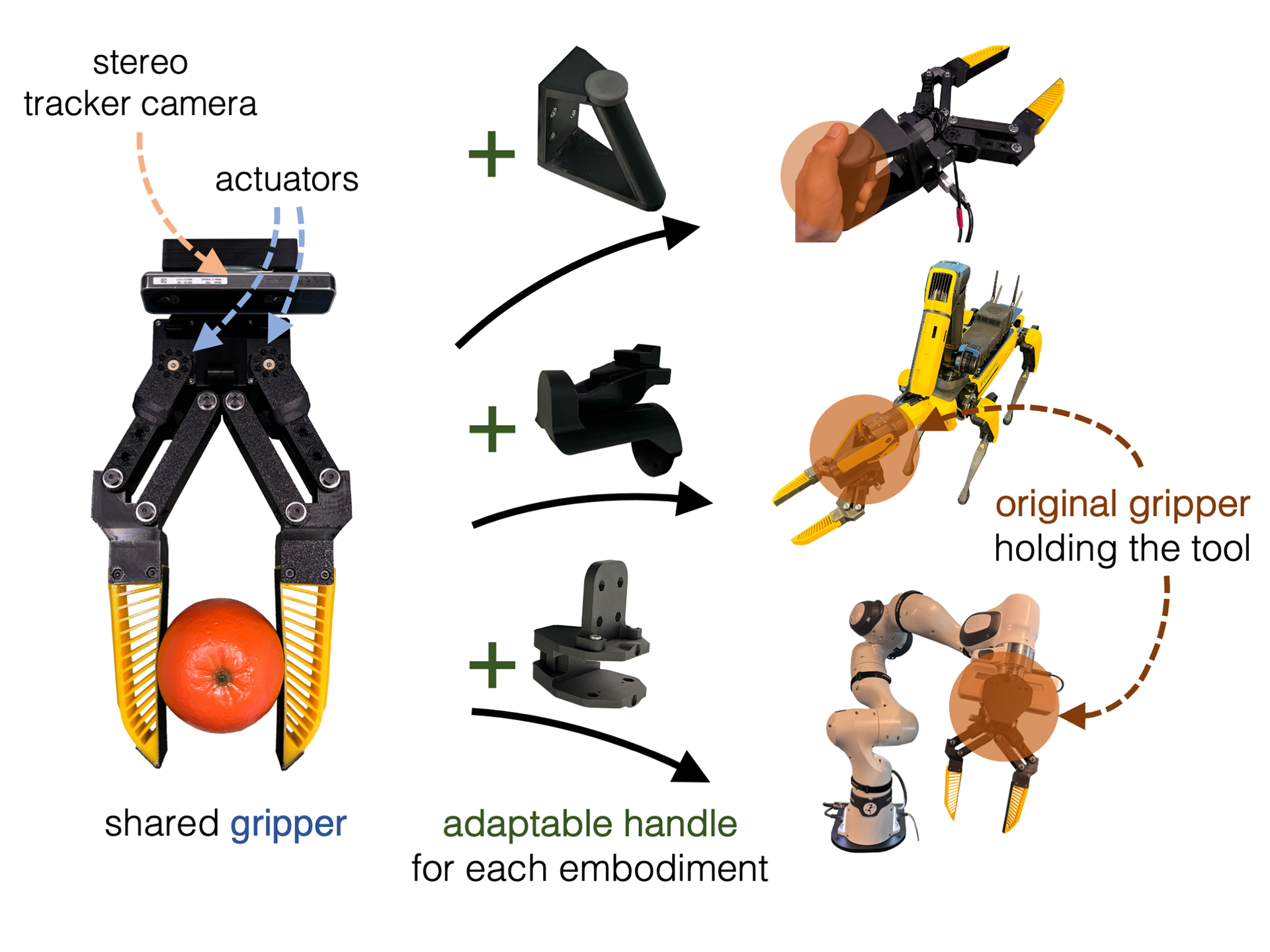
GELLO
Developed by: University of California Berkeley
A General, Low-Cost, and Intuitive Teleoperation Framework for Robot Manipulators
프로젝트 공유하기!
DYNAMIXEL 커뮤니티는 혁신의 허브입니다. DYNAMIXEL 액추에이터를 활용한 오픈소스 프로젝트가 있다면 알려 주세요.
Your Idea, Powered by DYNAMIXEL. 함께 미래를 만들어 갑시다.