ROS Controller Check Setting
Check Setting
Manipulator Description
- Jazzy
- Humble
- Noetic
- Arduino
Not supported.
Not supported.
NOTE:
Please launch the OpenMANIPULATOR-X Controller before running this section.
Publish a topic message to check the OpenMANIPULATOR-X setting.
$ rostopic pub /option std_msgs/String "print_open_manipulator_setting"
Manipulator Description will be printed on the terminal where the open_manipulator_controller is running.
Current configuration of the OpenMANIPULATOR-X is displayed.
Parameters related to the description is loaded from the open_manipulator.cpp in the open_manipulator_libs package.
~/catkin_ws/src/open_manipulator/open_manipulator_libs/src/open_manipulator.cpp
----------<Manipulator Description>----------
<Degree of freedom>
4.000
<Size of Components>
5.000
<Configuration of world>
[Name]
-World Name : world
-Child Name : joint1
[Static Pose]
-Position :
(0.000, 0.000, 0.000)
-Orientation :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
[Dynamic Pose]
-Linear Velocity :
(0.000, 0.000, 0.000)
-Linear acceleration :
(0.000, 0.000, 0.000)
-Angular Velocity :
(0.000, 0.000, 0.000)
-Angular acceleration :
(0.000, 0.000, 0.000)
<Configuration of gripper>
[Component Type]
Tool
[Name]
-Parent Name : joint4
[Actuator]
-Actuator Name : tool_dxl
-ID : 15
-Joint Axis :
(0.000, 0.000, 0.000)
-Coefficient : -0.015
-Limit :
Maximum : 0.010, Minimum : -0.010
[Actuator Value]
-Value : 0.008
-Velocity : 0.000
-Acceleration : 0.000
-Effort : 0.000
[Constant]
-Relative Position from parent component :
(0.130, 0.000, 0.000)
-Relative Orientation from parent component :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Mass : 0.000
-Inertia Tensor :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Center of Mass :
(0.000, 0.000, 0.000)
[Variable]
-Position :
(0.138, -0.005, 0.015)
-Orientation :
(-0.006, 0.043, 0.999
0.000, 0.999, -0.043
-1.000, 0.000, -0.006)
-Linear Velocity :
(0.000, 0.000, 0.000)
-Linear acceleration :
(0.000, 0.000, 0.000)
-Angular Velocity :
(0.000, 0.000, 0.000)
-Angular acceleration :
(0.000, 0.000, 0.000)
<Configuration of joint1>
[Component Type]
Active Joint
[Name]
-Parent Name : world
-Child Name 1 : joint2
[Actuator]
-Actuator Name : joint_dxl
-ID : 11
-Joint Axis :
(0.000, 0.000, 1.000)
-Coefficient : 1.000
-Limit :
Maximum : 3.142, Minimum : -3.142
[Actuator Value]
-Value : -0.043
-Velocity : 0.000
-Acceleration : 0.000
-Effort : 0.000
[Constant]
-Relative Position from parent component :
(0.012, 0.000, 0.017)
-Relative Orientation from parent component :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Mass : 0.000
-Inertia Tensor :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Center of Mass :
(0.000, 0.000, 0.000)
[Variable]
-Position :
(0.012, 0.000, 0.017)
-Orientation :
(0.999, 0.043, 0.000
-0.043, 0.999, 0.000
0.000, 0.000, 1.000)
-Linear Velocity :
(0.000, 0.000, 0.000)
-Linear acceleration :
(0.000, 0.000, 0.000)
-Angular Velocity :
(0.000, 0.000, 0.000)
-Angular acceleration :
(0.000, 0.000, 0.000)
<Configuration of joint2>
[Component Type]
Active Joint
[Name]
-Parent Name : joint1
-Child Name 1 : joint3
[Actuator]
-Actuator Name : joint_dxl
-ID : 12
-Joint Axis :
(0.000, 1.000, 0.000)
-Coefficient : 1.000
-Limit :
Maximum : 1.571, Minimum : -2.050
[Actuator Value]
-Value : -0.052
-Velocity : 0.000
-Acceleration : 0.000
-Effort : 0.000
[Constant]
-Relative Position from parent component :
(0.000, 0.000, 0.058)
-Relative Orientation from parent component :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Mass : 0.000
-Inertia Tensor :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Center of Mass :
(0.000, 0.000, 0.000)
[Variable]
-Position :
(0.012, 0.000, 0.075)
-Orientation :
(0.998, 0.043, -0.052
-0.043, 0.999, 0.002
0.052, 0.000, 0.999)
-Linear Velocity :
(0.000, 0.000, 0.000)
-Linear acceleration :
(0.000, 0.000, 0.000)
-Angular Velocity :
(0.000, 0.000, 0.000)
-Angular acceleration :
(0.000, 0.000, 0.000)
<Configuration of joint3>
[Component Type]
Active Joint
[Name]
-Parent Name : joint2
-Child Name 1 : joint4
[Actuator]
-Actuator Name : joint_dxl
-ID : 13
-Joint Axis :
(0.000, 1.000, 0.000)
-Coefficient : 1.000
-Limit :
Maximum : 1.530, Minimum : -1.571
[Actuator Value]
-Value : 0.546
-Velocity : 0.000
-Acceleration : 0.000
-Effort : 0.000
[Constant]
-Relative Position from parent component :
(0.024, 0.000, 0.128)
-Relative Orientation from parent component :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Mass : 0.000
-Inertia Tensor :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Center of Mass :
(0.000, 0.000, 0.000)
[Variable]
-Position :
(0.029, -0.001, 0.204)
-Orientation :
(0.880, 0.043, 0.474
-0.038, 0.999, -0.020
-0.474, 0.000, 0.880)
-Linear Velocity :
(0.000, 0.000, 0.000)
-Linear acceleration :
(0.000, 0.000, 0.000)
-Angular Velocity :
(0.000, 0.000, 0.000)
-Angular acceleration :
(0.000, 0.000, 0.000)
<Configuration of joint4>
[Component Type]
Active Joint
[Name]
-Parent Name : joint3
-Child Name 1 : gripper
[Actuator]
-Actuator Name : joint_dxl
-ID : 14
-Joint Axis :
(0.000, 1.000, 0.000)
-Coefficient : 1.000
-Limit :
Maximum : 2.000, Minimum : -1.800
[Actuator Value]
-Value : 1.083
-Velocity : 0.000
-Acceleration : 0.000
-Effort : -2.690
[Constant]
-Relative Position from parent component :
(0.124, 0.000, 0.000)
-Relative Orientation from parent component :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Mass : 0.000
-Inertia Tensor :
(1.000, 0.000, 0.000
0.000, 1.000, 0.000
0.000, 0.000, 1.000)
-Center of Mass :
(0.000, 0.000, 0.000)
[Variable]
-Position :
(0.138, -0.005, 0.145)
-Orientation :
(-0.006, 0.043, 0.999
0.000, 0.999, -0.043
-1.000, 0.000, -0.006)
-Linear Velocity :
(0.000, 0.000, 0.000)
-Linear acceleration :
(0.000, 0.000, 0.000)
-Angular Velocity :
(0.000, 0.000, 0.000)
-Angular acceleration :
(0.000, 0.000, 0.000)
---------------------------------------------
Not supported
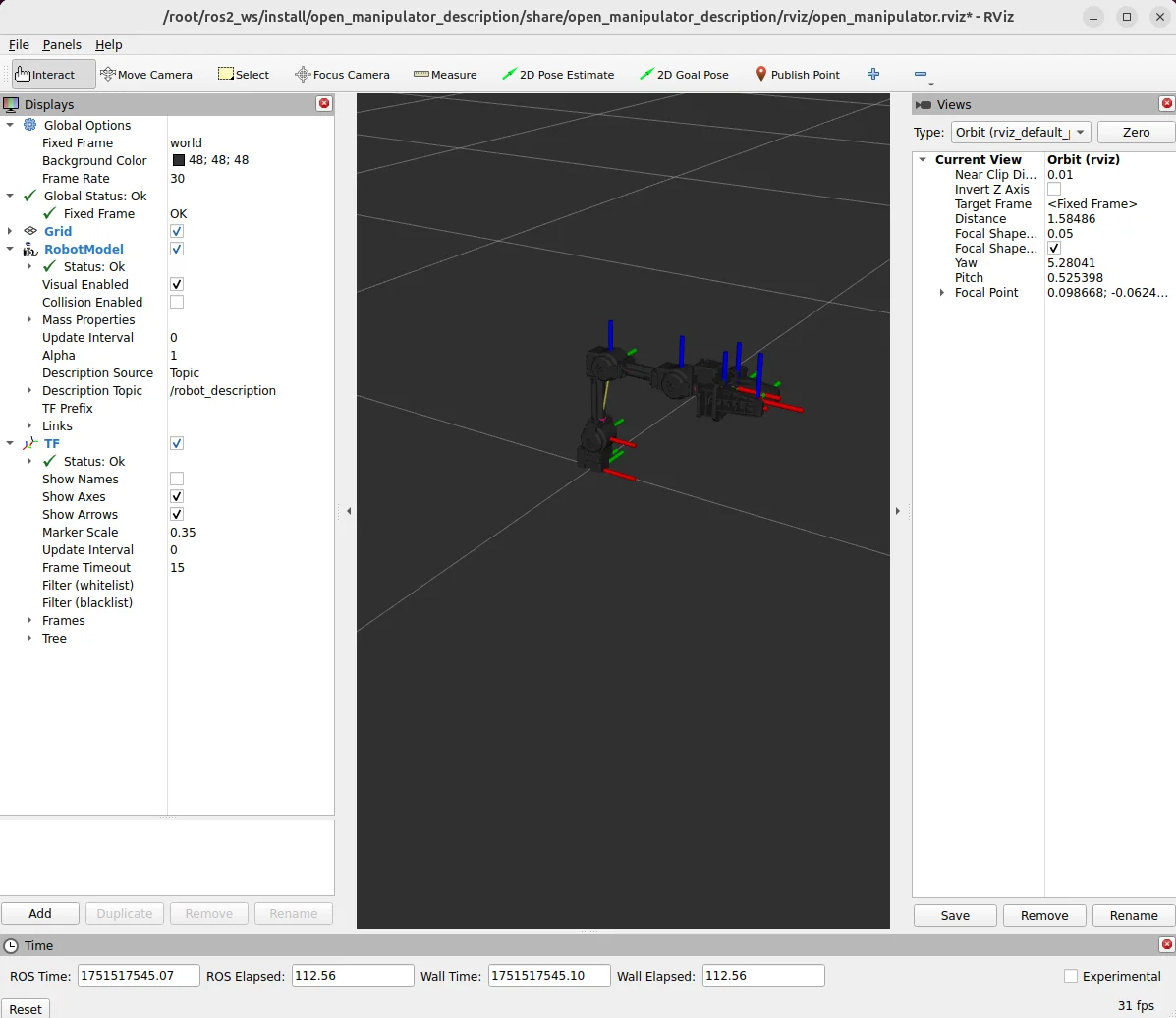
RViz
- Jazzy
- Humble
- Noetic
- Arduino
WARNING: Before running RViz, make sure to terminate all controller nodes including the bringup and other nodes that were previously running.
Load OpenMANIPULATOR-X on RViz.
$ ros2 launch open_manipulator_description open_manipulator_x.launch.py
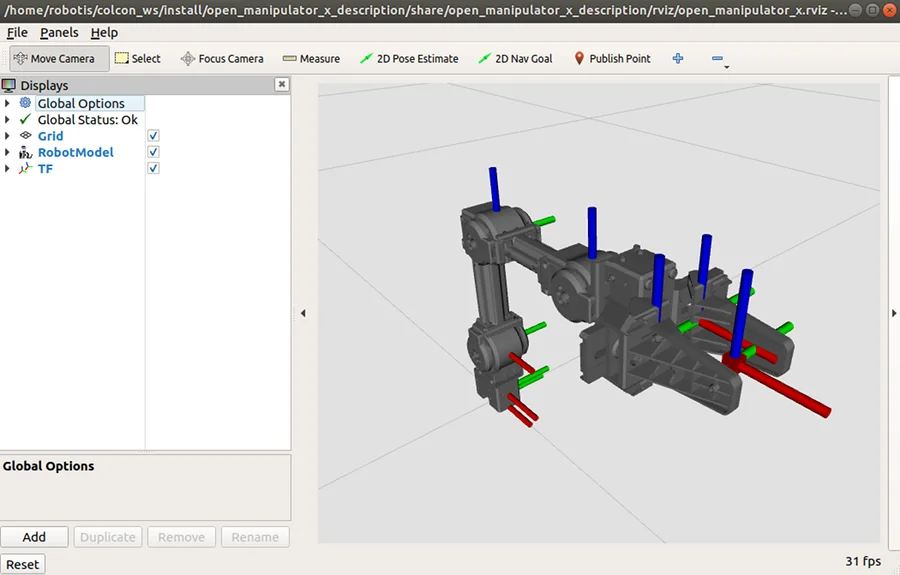
Load OpenMANIPULATOR-X on RViz.
$ ros2 launch open_manipulator_x_description model.launch.py
NOTE:
Please launch the OpenMANIPULATOR-X Controller before running this section.
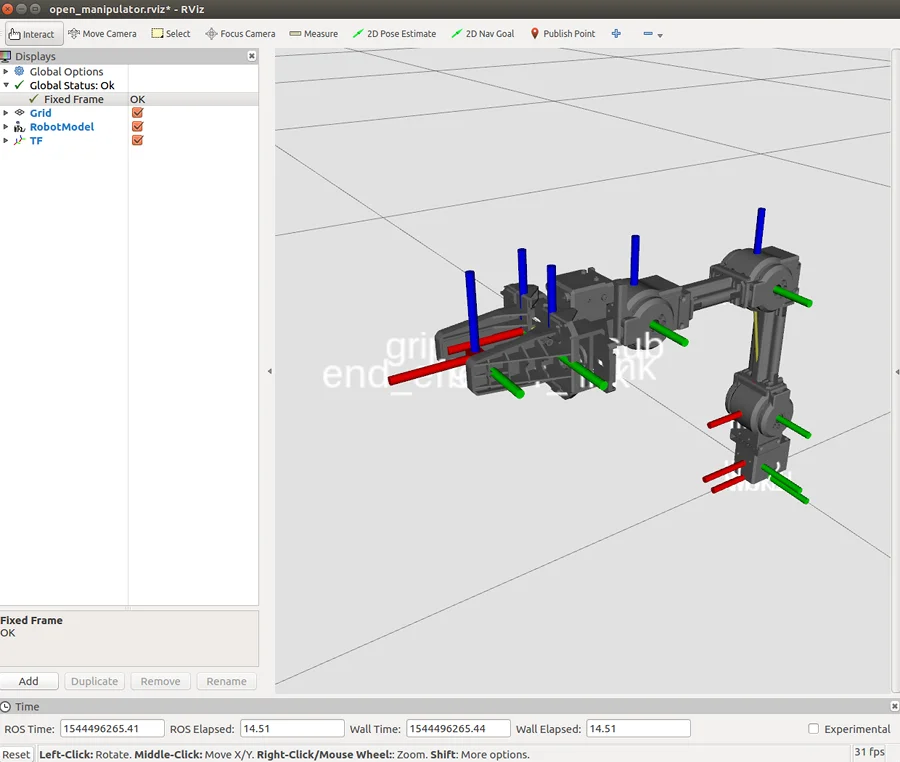
Load OpenMANIPULATOR-X on RViz.
$ roslaunch open_manipulator_description open_manipulator_rviz.launch
NOTE:
- If the OpenMANIPULATOR-X controller is running when the RViz is launched, the robot model on RViz will be synchronized with the actual pose of OpenMANIPULATOR-X.
- Installing the joint_state_publisher_gui package allows to simply test the OpenMANIPULATOR-X model. Make sure to install the package and launch the RViz with additional option.
- Install the joint_state_publisher_gui
$ sudo apt-get install ros-noetic-joint-state-publisher-gui- Launch the RViz with the GUI option
$ roslaunch open_manipulator_description open_manipulator_rviz.launch use_gui:=true
Not supported