[ROS 2] Manipulator Manager
NOTE:
- This instructions has been tested on
Ubuntu 16.04andROS Kinetic Kame. - This instructions are supposed to be running on PC ROS packages installed in. Please run the instructions below on your PC ROS packages installed in.
Launch Manager
$ sudo bash
[sudo] password for robotis:
# roslaunch open_manipulator_p_manager open_manipulator_p_manager.launch
If the manipulator manger has been launched successfully, the terminal will show the following message.
SUMMARY
========
PARAMETERS
* /gazebo: False
* /gazebo_robot_name: robotis_manipulat...
* /init_file_path: /home/user/catkin...
* /offset_table: /home/user/catkin...
* /robot_file_path: /home/user/catkin...
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
open_manipulator_p_manager (open_manipulator_p_manager/open_manipulator_p_manager)
ROS_MASTER_URI=http://localhost:11311
process[open_manipulator_p_manager-1]: started with pid [19408]
[ INFO] [1552279834.24ro20783]: manager->init
/dev/ttyUSB0 added. (baudrate: 1000000)
(/dev/ttyUSB0) [ID: 1] PH54-200-S500-R added.
(/dev/ttyUSB0) [ID: 2] PH54-200-S500-R added.
(/dev/ttyUSB0) [ID: 3] PH54-100-S500-R added.
(/dev/ttyUSB0) [ID: 4] PH54-100-S500-R added.
(/dev/ttyUSB0) [ID: 5] PH42-020-S300-R added.
(/dev/ttyUSB0) [ID: 6] PH42-020-S300-R added.
[ INFO] [1552279834.361381084]: Load offsets...
NOTE: If you have a gripper(RH-P12-RN(A)), download the source code of RH-P12-RN from GitHub and integrate the gripper module following the RH-P12-RN repository instructions.
Check Setting
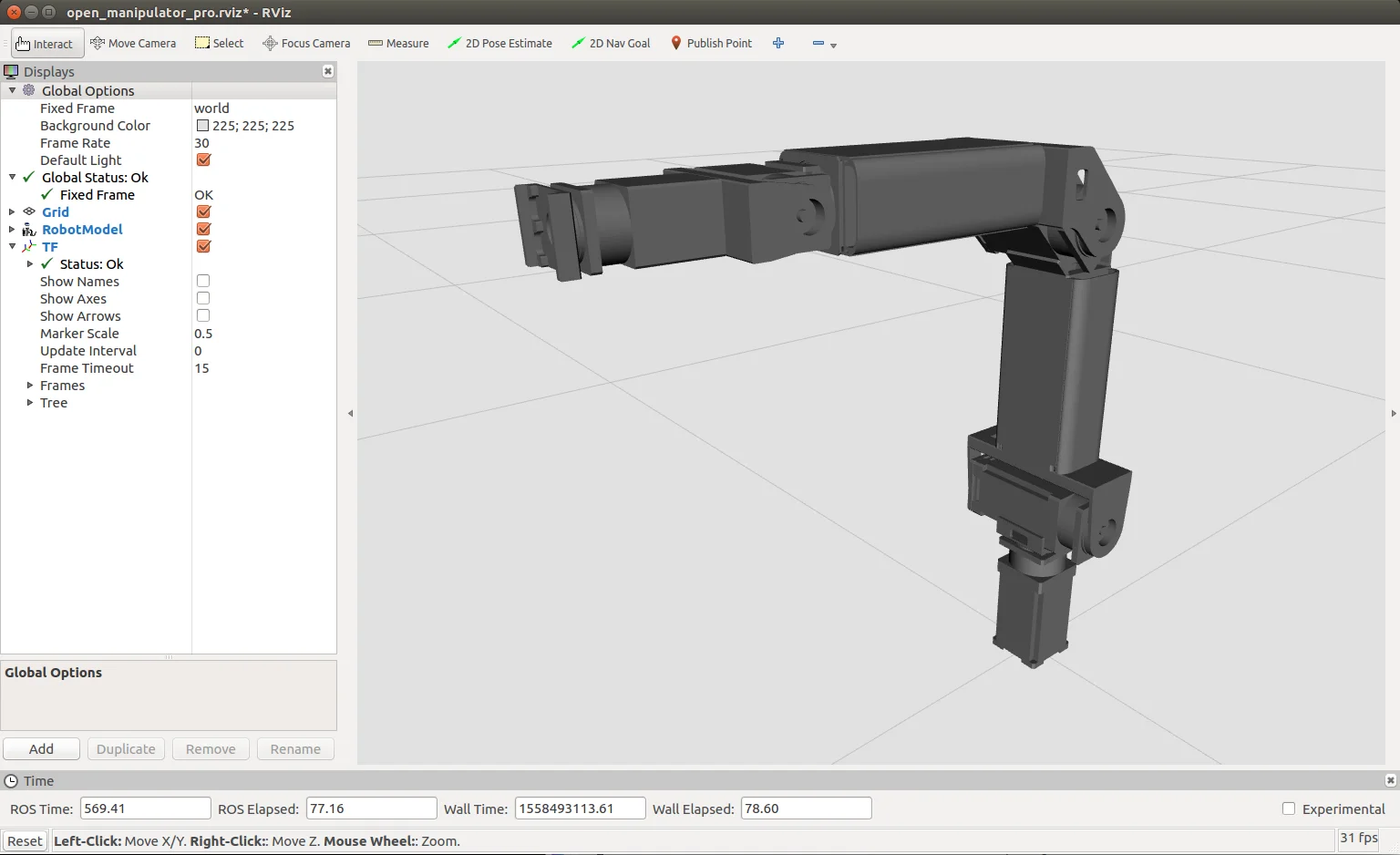
RViz
$ roslaunch open_manipulator_p_bringup open_manipulator_p.launch
If you have a gripper(RH-P12-RN(A)), see below.
$ roslaunch open_manipulator_p_bringup open_manipulator_p.launch with_gripper:=true
Message List
Topic
ROS Message Type
- JointPose.msg
name: target joint name (std_msgs/String)value: target joint value (std_msgs/Float64)
- KinematicsPose.msg
name: target kinematics group (std_msgs/String)pose: target Pose (geometry_msgs/Pose)
Subscribed Topics
/robotis/base/ini_pose_msg (std_msgs/String)
Message for initial pose
/robotis/base/set_mode_msg (std_msgs/String)
Message for set mode
/robotis/base/joint_pose_msg (manipulator_manipulation_module_msgs/JointPose)
Message for joint space control
/robotis/base/kinematics_pose_msg (manipulator_manipulation_module_msgs/KinematicsPose)
Message for task space control
Published Topics
/robotis/status(robotis_controller_msgs/StatusMsg)
Message for current state
Service
ROS Service Type
- GetJointPose.srv
- Request :
joint_name: joint name (std_msgs/String) - Response :
joint_value: joint value (std_msgs/Float64)
- Request :
- GetKinematicsPose.srv
- Request :
group_name: kinematics group (std_msgs/String) - Response :
group_pose: kinematics pose (geometry_msgs/Pose)
- Request :
Services
/robotis/base/get_joint_pose (manipulator_manipulation_module_msgs/GetJointPose)
Service to read current joint value
/robotis/base/get_kinematics_pose (manipulator_manipulation_module_msgs/GetKinematicsPose)
Service to read current end effector's pose