Model Training Guide
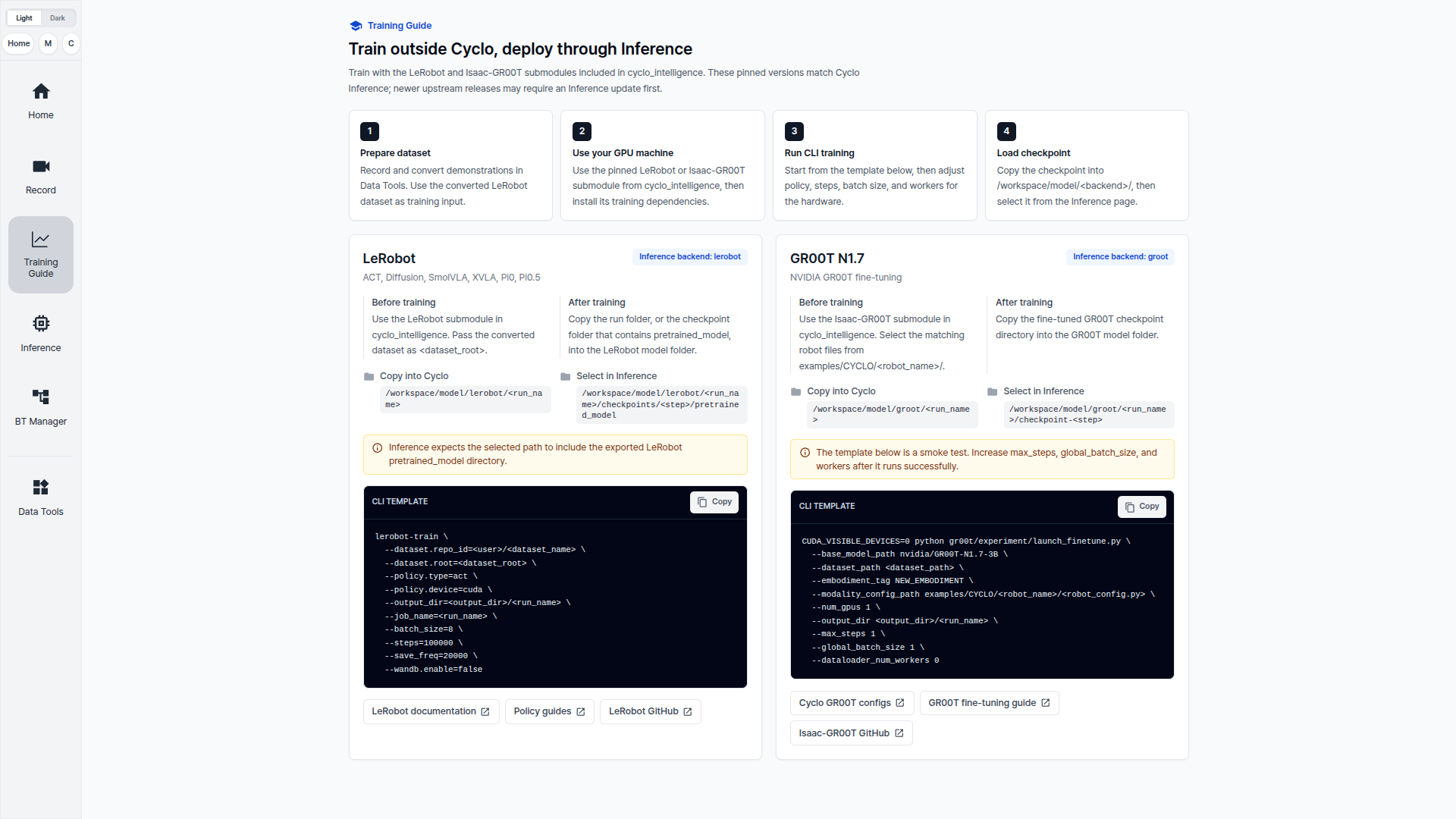
Training is performed outside Cyclo Intelligence. Training environments vary by model, GPU, framework version, and server setup, so Cyclo Intelligence provides this page as a guide instead of a fixed training Docker environment.
Use Data Tools to convert and upload the dataset. Train the model in your own training environment, then bring the trained model back into Cyclo Intelligence with Data Tools and run it from Model Inference.
The current guide focuses on LeRobot and GR00T workflows. Cyclo Intelligence aims to expand this training flow to Green VLA, RLDX, PI models, and other robot foundation model pipelines.