Hardware
| Model | AI Sapiens K1 |
| Height | 1366 mm |
| Weight | 35 kg |
| Degrees of freedom | 23 total |
| Actuators | DYNAMIXEL-Q QC060-200-R020-RE ×12, QC080-240-R020-RE ×11 |
| Electrical system | Compute, interfaces, and power |
AI Sapiens K1 is a compact humanoid hardware platform for physical AI development on real actuators and real contact. The hardware is organized around a 23-DOF body, DYNAMIXEL-Q QDD actuators, and an open mechanical structure for robot-side development.
Review the K1 mechanical layout here before working with motion, control, simulation, or real-robot deployment. For compute, interfaces, battery, and board-level electronics, see Electrical System.
Specifications may change as the product approaches launch. For additional inquiries, contact contactus@robotis.com.
AI Sapiens K1 Hardware Drawing
Inspect the K1 mechanical drawing and download the PDF for detailed reference.
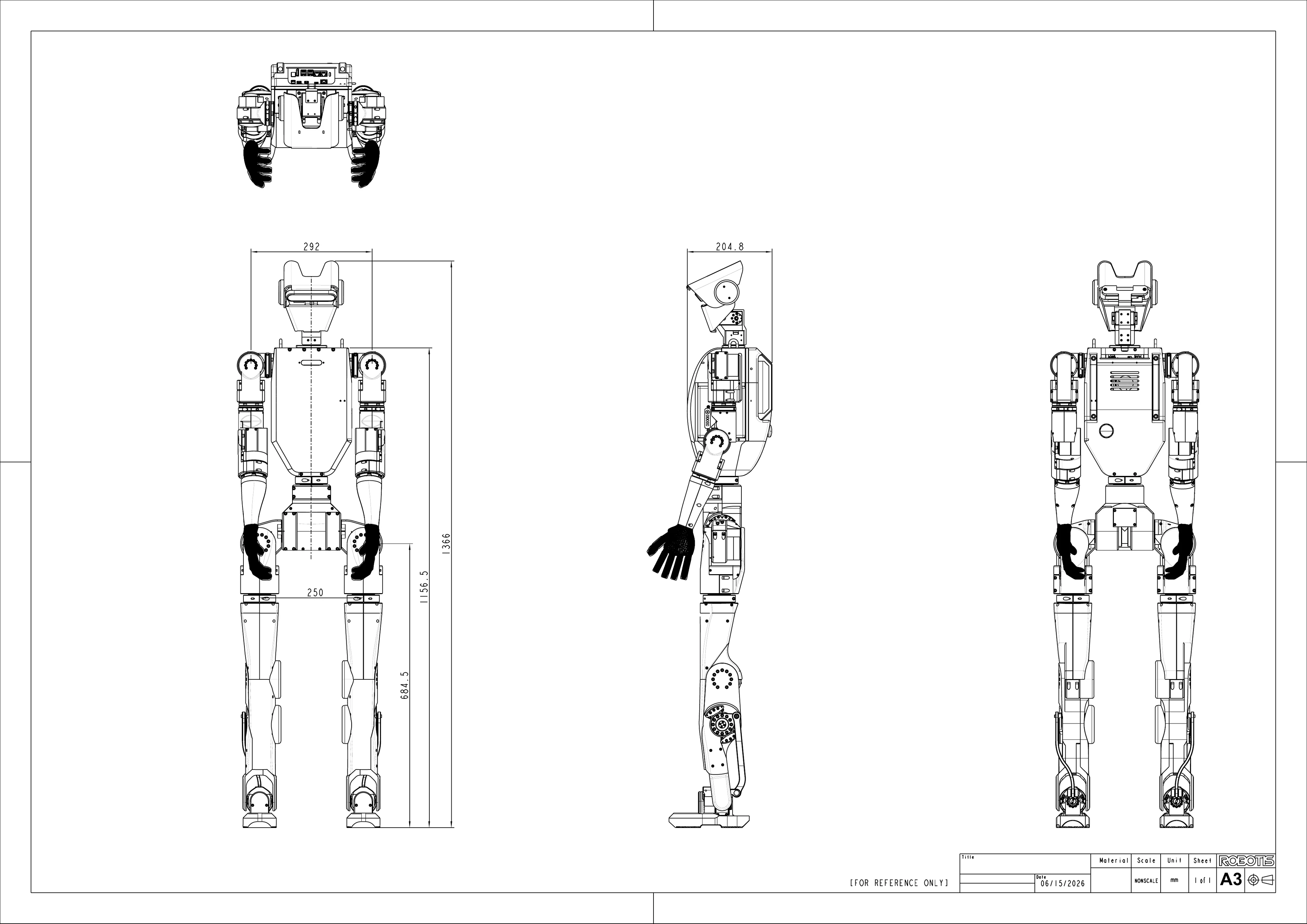
Mechanical Overview
K1 is a 1366 mm, 35 kg humanoid platform with a 23-DOF whole-body joint layout. Its joint arrangement is designed for locomotion, upper-body motion, and sim-to-real policy deployment.
| Item | Specification |
|---|---|
| Height | 1366 mm |
| Weight | 35 kg |
| Degrees of freedom | 23 total |
| Arm DOF | 5 per arm |
| Leg DOF | 6 per leg |
| Waist DOF | 1 |
Joint Layout
| Body area | DOF | Notes |
|---|---|---|
| Left arm | 5 | Shoulder, elbow, and wrist motion for upper-body tasks |
| Right arm | 5 | Mirrored upper-body joint layout |
| Left leg | 6 | Hip, knee, and ankle joints for bipedal locomotion |
| Right leg | 6 | Mirrored lower-body joint layout |
| Waist | 1 | Yaw motion for whole-body coordination |
| Total | 23 | Whole-body motion platform |
Actuator System
AI Sapiens K1 uses DYNAMIXEL-Q actuators, including QC060-200-R020-RE and QC080-240-R020-RE. DYNAMIXEL-Q is a QDD actuator lineup that combines low gear reduction, a low-inertia PMSM design, integrated electronics, and high-speed communication for dynamic humanoid control.


| Actuator | Quantity | Role |
|---|---|---|
| QC060-200-R020-RE | 12 | Compact joints where lower mass and smaller packaging are important |
| QC080-240-R020-RE | 11 | Higher-capacity joints for larger load paths |
| Item | Specification |
|---|---|
| Motor type | Low-inertia inner rotor PMSM |
| Rated voltage | 48 V |
| Ratio | 20:1 |
| Backlash | 10 arcmin |
| Size | Ø58 x 60 mm |
| Max torque | 30.0 Nm |
| Max speed | 200.0 rpm |
| Hollow shaft | Ø5 mm |
| Weight | 435 g |
| Torque density | 24.37 Nm/kg |
| Item | Specification |
|---|---|
| Motor type | Low-inertia inner rotor PMSM |
| Rated voltage | 48 V |
| Ratio | 20:1 |
| Backlash | 10 arcmin |
| Size | Ø78 x 65 mm |
| Max torque | 72.6 Nm |
| Max speed | 110.0 rpm |
| Hollow shaft | Ø7 mm |
| Weight | 845 g |
| Torque density | 28.64 Nm/kg |
Hardware Resources
AI Sapiens is designed as an open hardware-friendly platform. These resources help users inspect the mechanism, integrate accessories, and modify exterior parts.
| Resource | Status |
|---|---|
| Hardware BoM | Coming soon |
| STEP files | Coming soon |
| 3D-printable covers | Coming soon |
| Tutorials | Coming soon |
The default front cover, rear cover, and head files are planned as open-source, 3D-printable parts so users can modify and extend the exterior design.