Electrical System
Review the K1 compute module, communication interfaces, power system, and board-level components here. PCB files, MCU firmware, and wiring documents will be shared separately.
Compute
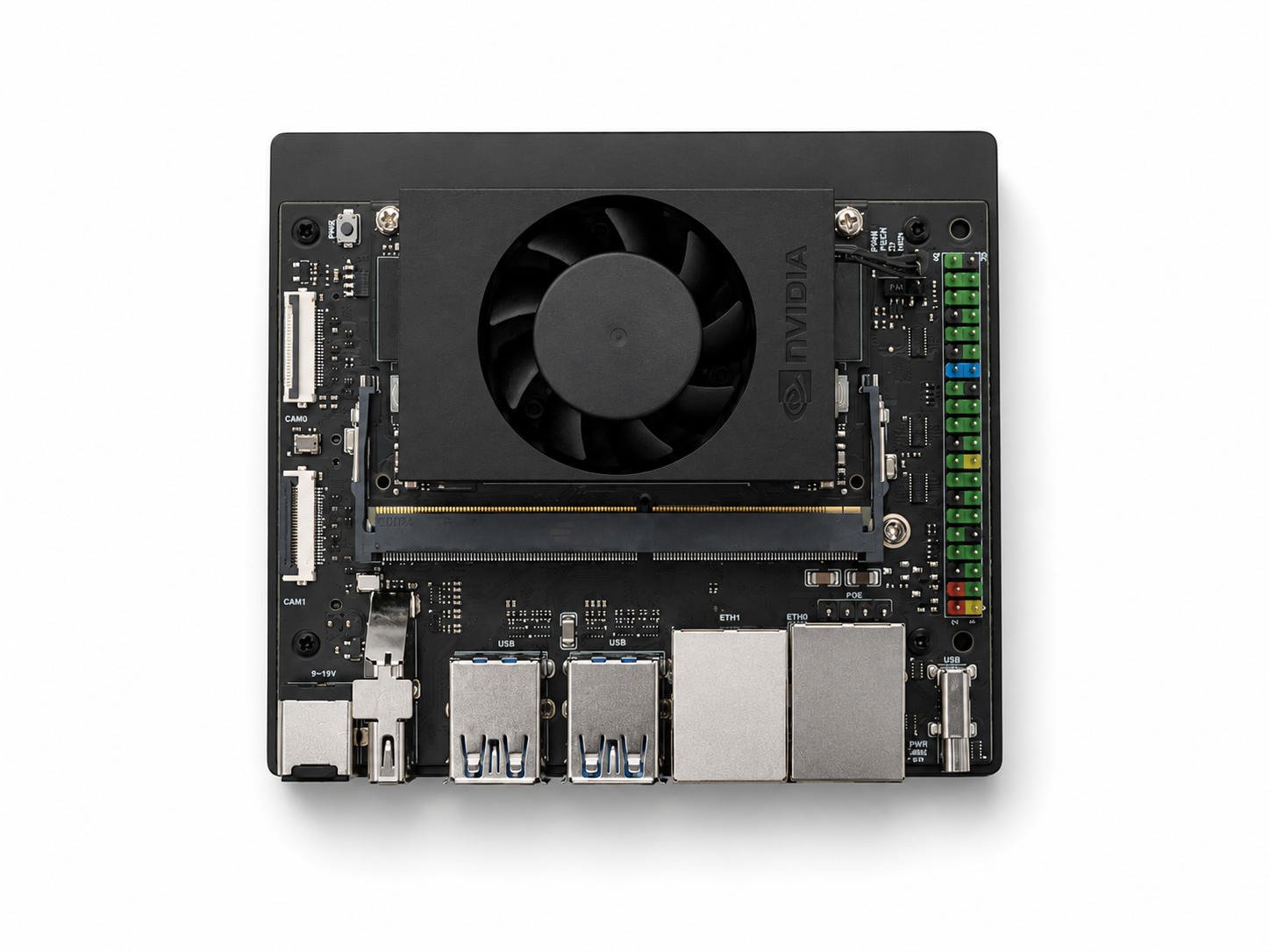
K1 uses the NVIDIA® Jetson Orin™ NX 16GB module for robot-side computation. This compute stack supports control, perception, learning workflows, and deployment of trained policies on the robot.
| Item | Specification |
|---|---|
| Module | NVIDIA® Jetson Orin™ NX 16GB |
| Storage | 256 GB SSD |
| CPU | 8-core Arm® Cortex®-A78AE v8.2 64-bit CPU |
| GPU | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores |
| AI performance | Up to 157 TOPS |
Interfaces
The platform exposes wired and wireless interfaces for development, operation, and external PC workflows.
| Item | Specification |
|---|---|
| Wireless | Wi-Fi 5, Bluetooth 5.0 (RTL8822CE) |
| Ethernet 2.5 Gbps | ×1 |
| Ethernet 1 Gbps | ×1 |
| USB-A 3.2 Gen 2 | ×3, up to 10 Gbps data transmission |
| USB-A 2.0 | ×1, supports 480 Mbps data transmission |
| USB-C | ×1, for system burning |
Power
K1 is powered by a Li-ion 21700, 13S2P battery built with LG Energy Solution M50LT cells. The battery provides 48 V nominal voltage and 460.8 Wh energy capacity. Board-level output rails are listed under the K1 HAT Board section.
| Item | Specification |
|---|---|
| Main battery | Li-ion 21700, 13S2P |
| Cell model | LG Energy Solution M50LT |
| Nominal voltage | 48 V |
| Capacity | 10 Ah |
| Energy capacity | 460.8 Wh |
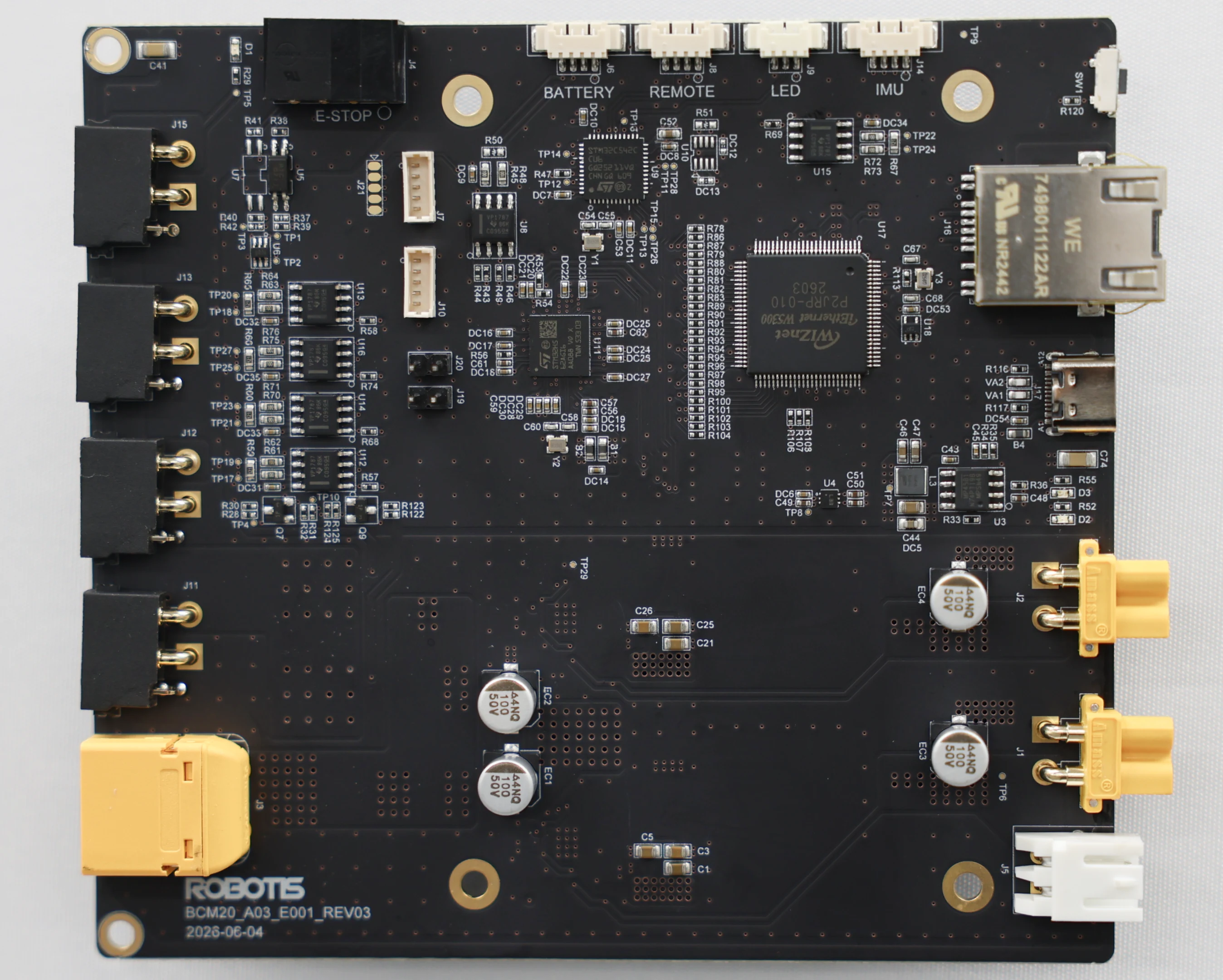
K1 HAT Board
The K1 HAT (Hardware Attached on Top) Board integrates robot-side power and embedded control functions, including the DYNAMIXEL Hub for Ethernet-to-RS-485 communication, emergency stop, battery monitoring, remote control, and LED control.
| Item | Specification |
|---|---|
| MCU | STM32H562AGI6 for the embedded DYNAMIXEL Hub, which bridges Ethernet to RS-485 |
| MCU | STM32C532CCU6 for remote controller, BMS, and other board functions |
| Input voltage | 30-60 V, recommended 48 V |
| Output voltage | 24 V up to 5 A; 12 V up to 5 A |
| Ethernet | 100 Mbps |
| DYNAMIXEL communication | RS-485, 5 ports, up to 6 Mbps |
| DYNAMIXEL protocol | DYNAMIXEL Protocol 2.0 |
| Functions | DYNAMIXEL Hub, emergency stop, battery monitoring, remote control, LED control |
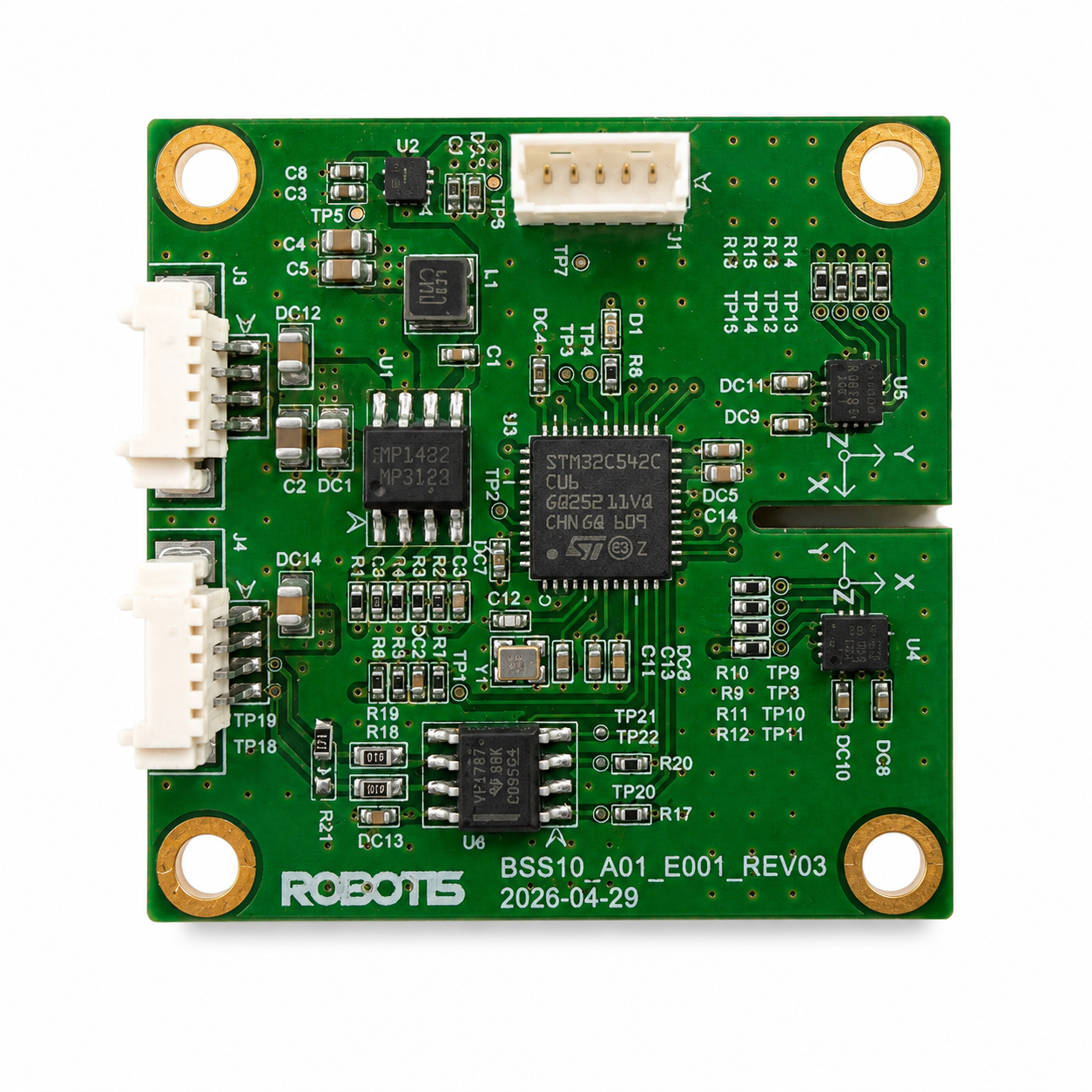
K1 IMU Board
The K1 IMU Board provides inertial sensing for robot state estimation and control.
| Item | Specification |
|---|---|
| MCU | STM32C532CCU6 |
| IMU | ICM-42688-P or BNO085 |
| Input voltage | 30-60 V, recommended 48 V |
| DYNAMIXEL communication | RS-485, up to 6 Mbps |
| DYNAMIXEL protocol | DYNAMIXEL Protocol 2.0 |
Resources
Coming Soon
Electrical system resources for AI Sapiens K1 will be added here.
| Resource | Status |
|---|---|
| PCB design files | Coming soon |
| MCU firmware | Coming soon |
| Wiring and pinout documents | Coming soon |