- Servo library is used to drive RC servo for RC.
- RC Servo Library uses OpenCM9.04 hardware timer and can be used by connecting to PWM output pin.
- A2 to D14 pins are PWM output pins.
- Be careful when using Servo library because other functions using hardware timer can not be used at the same time.
- See the list below for the hardware and channels used.
{GPIOA, GPIO_PIN_0, &hADC1, ADC_CHANNEL_0 , &hTIM2 , TIM_CHANNEL_1, 2 }, // 2
{GPIOA, GPIO_PIN_1, &hADC1, ADC_CHANNEL_1 , &hTIM2 , TIM_CHANNEL_2, 3 }, // 3
{GPIOA, GPIO_PIN_2, &hADC1, ADC_CHANNEL_2 , &hTIM2 , TIM_CHANNEL_3, 4 }, // 4
{GPIOA, GPIO_PIN_3, &hADC1, ADC_CHANNEL_3 , &hTIM2 , TIM_CHANNEL_4, 5 }, // 5
{GPIOA, GPIO_PIN_6, &hADC1, ADC_CHANNEL_6 , &hTIM3 , TIM_CHANNEL_1, 6 }, // 6
{GPIOA, GPIO_PIN_7, &hADC1, ADC_CHANNEL_7 , &hTIM3 , TIM_CHANNEL_2, 7 }, // 7
{GPIOB, GPIO_PIN_0, &hADC1, ADC_CHANNEL_8 , &hTIM3 , TIM_CHANNEL_3, 8 }, // 8
{GPIOB, GPIO_PIN_1, &hADC1, ADC_CHANNEL_9 , &hTIM3 , TIM_CHANNEL_4, 9 }, // 9
{GPIOA, GPIO_PIN_8, NULL, NO_ADC , &hTIM1 , TIM_CHANNEL_1, 10 }, // 10
{GPIOA, GPIO_PIN_9, NULL, NO_ADC , &hTIM1 , TIM_CHANNEL_2, 11 }, // 11
{GPIOA, GPIO_PIN_10, NULL, NO_ADC , &hTIM1 , TIM_CHANNEL_3, 12 }, // 12
{GPIOB, GPIO_PIN_8, NULL, NO_ADC , &hTIM4 , TIM_CHANNEL_3, 13 }, // 13
{GPIOB, GPIO_PIN_9, NULL, NO_ADC , &hTIM4 , TIM_CHANNEL_4, 14 }, // 14 LED
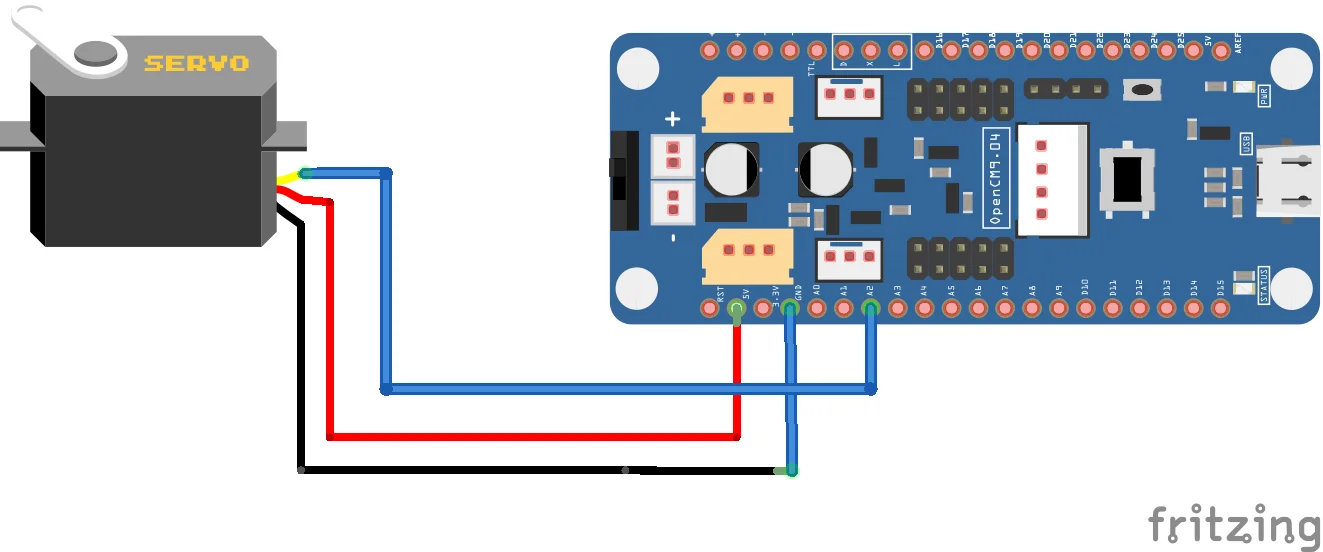
Connection
Arduino code
This is an example of a Servo library and uses the A2 pin of OpenCM9.04. The range of the input value is 0 to 180 degrees.
#include <Servo.h>
Servo myservo; // create servo object to control a servo
void setup() {
myservo.attach(A2); // attaches the servo on pin 2 to the servo object
}
void loop() {
myservo.write(0); // sets the servo position according to the scaled value
delay(1000); // waits for the servo to get there
myservo.write(180); // sets the servo position according to the scaled value
delay(1000); // waits for the servo to get there
}